


§ 2.5 Подвижное соединение деталей и его кинематика. Виды кинематических пар

Робот — это по определению подвижная машина. Он либо двигается сам, либо у него двигаются отдельные части, либо двигается все сразу. А это значит, что при его сборке есть необходимость в создании соединений деталей, которые позволяли бы двигаться им относительно друг друга.
Для этого потребуется познакомиться с такой наукой, как механика. В частности с ее разделом, который изучает математическое описание движения тел в упрощенном, идеализированном виде. Он называется кинематикой (от греческого слова κινειται - двигаться).
В кинематике тела, участвующие в движении, называются звеньями. А соединение звеньев, в котором они движутся относительно друг друга, именуется кинематической парой, то есть два звена образуют взаимно подвижное соединение.
Звенья в кинематике представляются в виде идеализированных тел. А при сборке роботов из конструктора используются реальные детали, которые по геометрии и форме совершенно не похожи на идеальные тела. Те не менее, все математические закономерности и принципы, которые формулирует кинематика, точно так же применимы и к настоящим деталям. В этом вы уже скоро сможете убедиться при выполнении практических проектов. Поэтому материал данного параграфа очень важен для понимания в дальнейшем правил создания конструкций робота.
Звенья в кинематической паре могут двигаться взаимно совершенно по-разному. В разных парах у звеньев может быть много подвижностей или мало, они могут вращаться или двигаться прямолинейно. По характеру движения существует 8 видов кинематических пар. Рассмотрим их с точки зрения понимания механики роботов.
Для объяснения особенностей кинематических пар потребуется понимание, что из себя представляют координаты точки или твердого тела. Когда движется робот или элементы его конструкции, они перемещаются в пространстве. То есть меняется одно местоположение на другое.
Что и как может рассказать об этом перемещении? Как его зафиксировать? Как его выразить количественно?
Эта задача давным-давно решена с помощью системы координат.
Координаты — это числа, заданием которых определяется положение точки или тела на плоскости, на любой поверхности или в пространстве.
Система координат — это система отсчета, которая используется для определения положения точки или тела в пространстве.
Координатами в выбранной системе координат определяется местоположение робота и его частей в процессе движения. С их помощью выполняется управление роботом: задаются конкретные координаты, и он перемещается в соответствующее место. Поэтому координаты и система координат— это важнейшие математические понятия, на которых стоит наука робототехника.
В §1.5 мы уже касались систем координат. На рисунке 1.5.5 показаны их разновидности на примере разных конструкций промышленных роботов. В промышленной робототехнике наибольшее распространение получили манипуляторы, работающие в угловой системе координат. Однако изучение принципов использования систем координат для управления машинами и механизмами проще всего начинать с прямоугольной системы. Она получила еще название декартовой системы координат по имени ученного, придумавшего ее. Такая система представляет собой точку отсчета, из которой расходятся перпендикулярно друг другу три оси, обозначенные X, Y, Z.
Базовым понятием кинематики является материальная точка. Это тело с очень маленькими размерами, которыми можно пренебречь. Соответственно, расположение точки однозначно задается тремя числами, отложенными по своим осям. Например, на рисунке 2.5.1 показано расположение материальной точки в прямоугольной системе координат. По осям отложены расстояния, например, в метрах. Таким образом, на указанном рисунке точка имеет координаты Хт = 2,5 м, Yт = 3,7 м, Zт = 2,7 м.
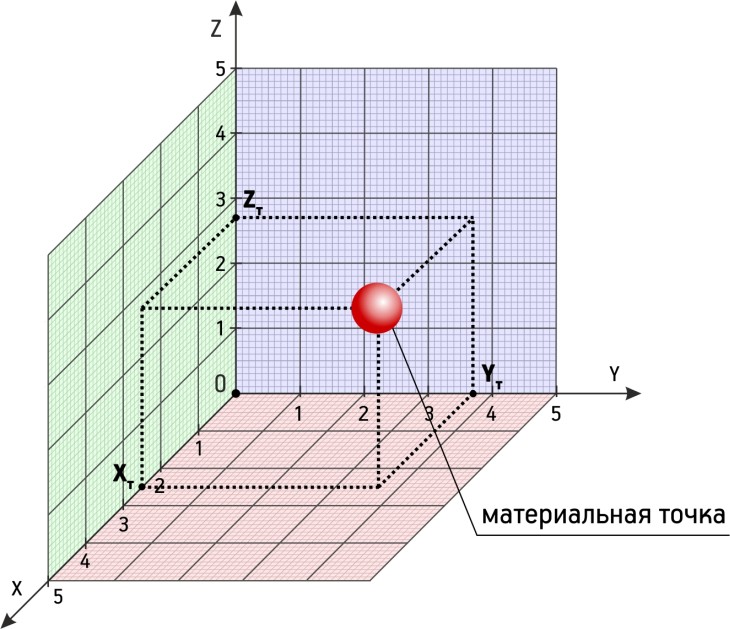 |
| Рис. 2.5.1. Расположение материальной точки в декартовой системе координат и определение ее координат по осям |
С помощью именно такой системы координат описываются кинематические пары, которые соответствуют возможным вариантам соединения деталей и узлов. Только есть важное дополнение. Декартова система координат позволяет определить положение точки. А кинематические пары составляются из звеньев, представляющих собой твердые тела с размерами, которыми уже пренебрегать нельзя. И для того чтобы определить положение одного звена относительного другого, необходимо задать не только координаты какой-либо точки этого тела (условный центр тела или какая-либо характерная точка), но и углы поворота тела относительно данной точки.
Итого получается, что для однозначного определения положения тела в пространстве необходимы 3 координаты положения точки тела (например его геометрического центра) в декартовой системе координат и 3 угла поворота тела относительно этой точки. Сложив их, получим 6 координатных количественных характеристик, которые могут независимо друг от друга изменяться и которые однозначно задают положение тела (рис. 2.5.2).
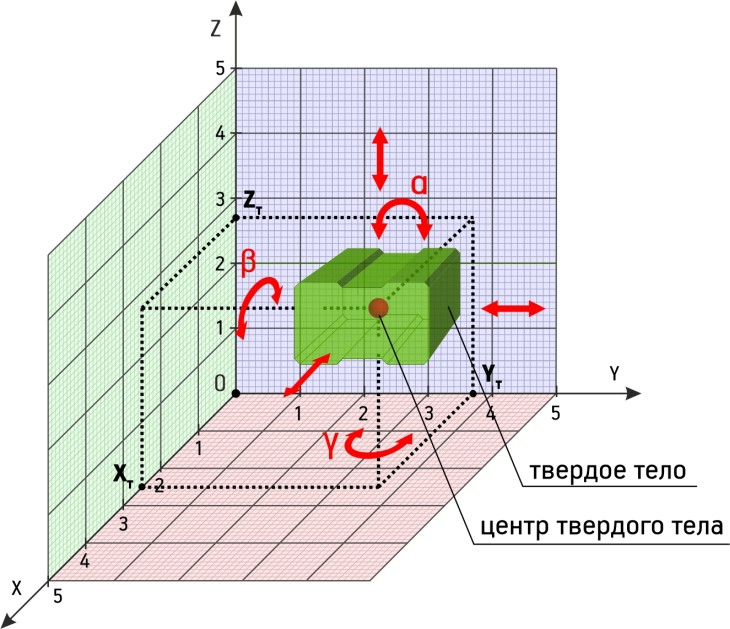 |
| Рис. 2.5.2. Описание местоположения и ориентации твердого тела по координатам его центра и углам поворота относительно координатных осей |
Отсюда возникает еще одно очень важно понятие в робототехнике, с которым связаны кинематические пары — степень свободы. Если совсем просто, то степень свободы — это координата одного звена относительно второго звена, которая может независимо изменяться во время их взаимного движения. То есть она описывает подвижность звена по конкретной координатной характеристике. Если же координата не может изменяться в силу конструкции пары, то она называется связью. Сумма степеней свободы и связей для твердого тела всегда равна 6.
Ниже приведена таблица с описанием ранее упомянутых 8-ми видов кинематических пар, которые имеют место в механизмах и которые вы сможете наблюдать в дальнейших проектах. Помимо названия пары и указания количества степеней свободы в ней представлены 3-Д иллюстрации с внешним видом пары и ее краткое описание.
На всех картинках звенья, образующие пару, имеют разные цвета. Звено №1 красное, а звено №2 зеленое. Любое взаимное движение двух звеньев можно представить как движение одного звена относительно второго. Поэтому допустим, что звено №1 неподвижно относительно выбранной системы координат. А второе звено двигается. Получается, что его координаты относительно первого звена при движении изменяются. Возможные движения звена показаны стрелочками. Если при этом изменяются координаты в прямоугольной системе координат, то они обозначены буквами Xзв2, Yзв2, Zзв2, стрелочки при этом прямые. Возможные вращения обозначены буквами αзв2, βзв2, γзв2 и стрелочки в этом случае изображены в виде дуги.
| Название пары | Внешний вид | Число степеней свободы | Описание |
| Вращательная | 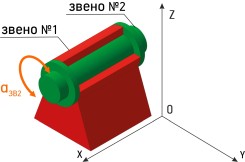 |
1 | В данной кинематической паре цилиндрическое звено №2 может только вращаться в ответной цилиндрической части первого звена. Положение звена №2 полностью определяется углом поворота αзв2. |
| Винтовая | 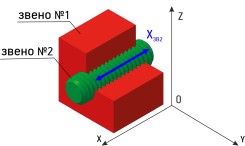 |
1 | Это кинематическая пара, в которой оба звена имеют винтовую поверхность в виде резьбы или специальных направляющих. При вращении звена №2 оно линейно перемещается внутри звена №1. Вращение звена и его линейное перемещение жестко связаны. Поэтому при движении звена №2 изменяется только его координата Хзв2 по оси координат Х. |
| Поступательная | 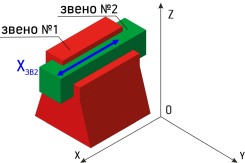 |
1 | Особенность конструкции поступательной кинематической пары заключается в том, что звено №2 может перемещаться по направляющему звену №1 только линейно в одном направлении. Поворот невозможен по причине нецилиндрического сечения. Соответственно, местоположение звена №2 однозначно определяется одной координатой Хзв2. |
| Цилиндрическая | 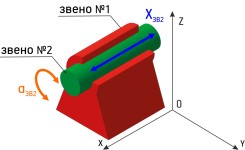 |
2 | Цилиндрическая пара похожа на вращательную, но отличается от нее тем, что у звена №2 нет выступов, мешающих его перемещению по оси Х. Поэтому звено №2 может не только вращаться, но и двигаться по оси Х. Таким образом, местоположение задается углом поворота αзв2 и координатой Хзв2. |
| Плоскостная | 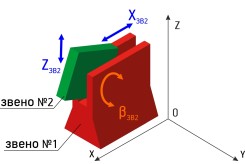 |
3 | Плоскостная пара означает, что звено №2 имеет плоские поверхности, через которые она контактирует с такими же плоскими поверхностями звена №1. Такое соединение допускает линейное перемещение по двум координатам (Хзв2 и Zзв2 на рисунке) и вращение (угол поворота βзв2). |
| Сферическая | 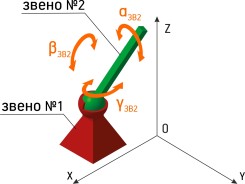 |
3 | Звено №2 в сферической паре может исключительно вращаться. Контакт шара с внутренней сферической поверхностью не допускает линейных перемещений. Поэтому положение звена №2 полностью задается тремя углами поворота αзв2, βзв2, γзв2. |
| Линейная | 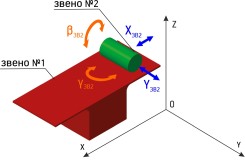 |
4 | Линейная пара — это пара звеньев, одно из которых имеет цилиндрическую или коническую форму, а второе представляет собой плоскую поверхность. При таком соединении контакт звеньев происходит по линии. Получается, что звено №2 может поворачиваться в двух плоскостях (углы βзв2, γзв2) и перемещаться по двум осям (координаты Xзв2, Yзв2). |
| Точечная | 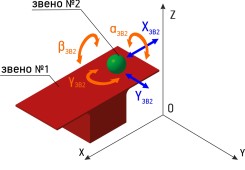 |
5 | Контакт (связь) по точке (отсюда название точечной пары) может быть только между шаром и плоскостью либо цилиндрической (криволинейной) поверхностью. Для простоты на рисунке изображена именно плоская поверхность. У такой пары есть только одна связь в точке. Поэтому шар обладает максимальным количеством степеней свободы. Его положение задается с помощью всех трех углов поворота αзв2, βзв2, γзв2 и двух координатXзв2, Yзв2. |
Данные о кинематических парах, приведенные в указанной таблице, помогут вам более грамотно конструировать подвижные соединения деталей. Как именно — станет отчасти понятно уже в следующем параграфе.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: